1.基本情况
面向现代设施农业作业需求,团队研发了一种具备自主导航与运载能力的温室移动机器人。系统采用模块化设计,集成控制板、工控机、激光雷达、驱动电机及人机交互单元,可依据预设路径实现自主移动与精准配送,在温室复杂环境中完成物资运输任务,显著降低人工劳动强度,提高作业效率。

图1 设施农业自主导航搬运机器人
2.技术特点
在技术方面,系统以嵌入式开发板与工控机为核心,融合激光雷达实现环境感知、定位与避障,能够适应通道狭窄、环境复杂的温室场景。运动系统采用无刷直流减速电机,实现速度精确控制和差速转向;配备大尺寸越野轮胎,提升对松软及不平整地面的通过能力。同时,系统具备人机交互界面,可实时监控运行状态并支持人工干预。
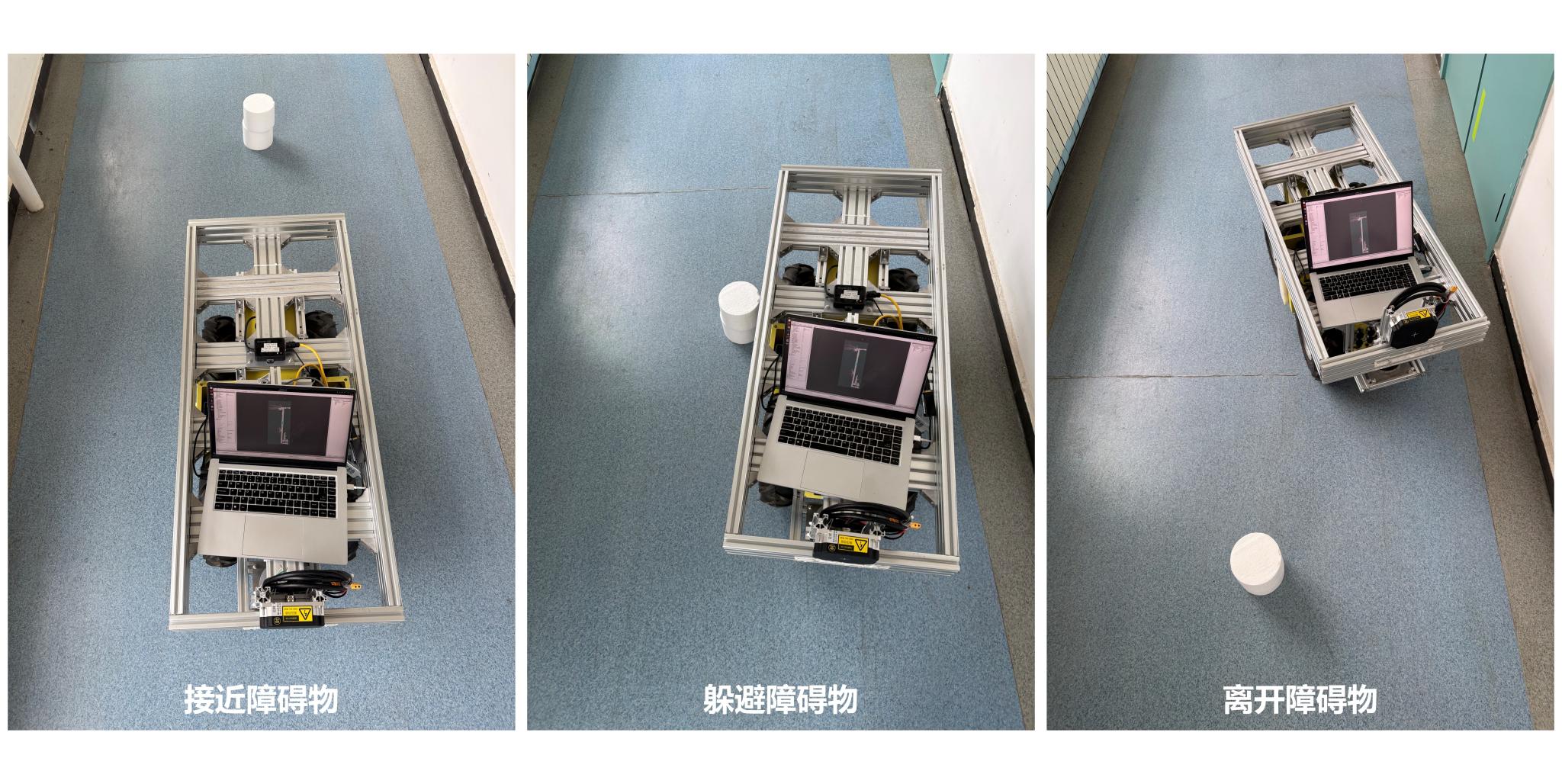
图2 搬运机器人自主导航避障过程
3.应用范围
该成果主要应用于蔬菜、果蔬及花卉等温室生产中的物资搬运与流转,如肥料运输、采摘物转运等,可提升温室内部物流自动化水平。面向规模化种植企业、农业合作社、科研院所及示范园区推广应用,并可与农业装备制造商及智慧农业系统集成商协同,实现与环境监测、自主作业等系统融合,支撑设施农业向智能化、无人化发展。
4.知识产权
已申请专利。
5.技术成熟度
本成果目前处于小规模试验阶段,已完成原理样机研制并开展初步功能验证。系统较好地实现自主导航与搬运功能,具备进一步优化与工程化应用的基础。后续将通过性能优化与场景测试,逐步推进样机完善与规模化应用。

图3 首届智慧农业创新大赛搬运作业
6.合作需求
寻求具备完整生产资质的企业,进行中试实验,建立标准化生产工艺,并取得相关产品注册,完成转化。转化方式可合作开发、技术许可、技术转让。


 京公网安备110402430101 Copyright © 2024 Beijing University of Agriculture 开云kaiyun登录入口社会服务处
京公网安备110402430101 Copyright © 2024 Beijing University of Agriculture 开云kaiyun登录入口社会服务处